GAMES101-lecture04
transformation 2
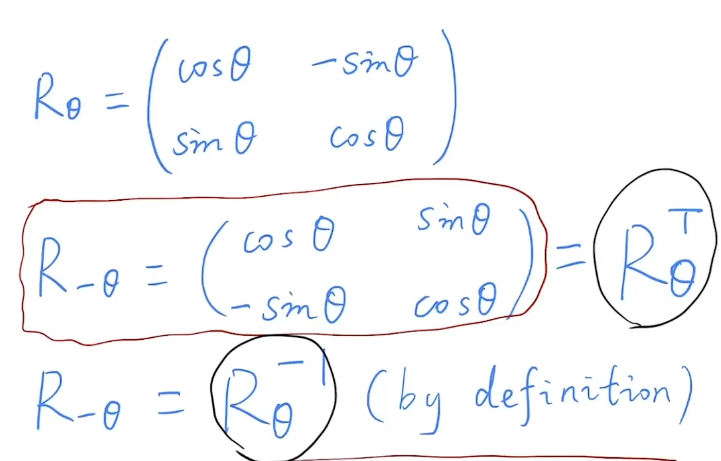
旋转矩阵的逆矩阵是其转置矩阵(旋转矩阵是正交矩阵)
3D transformation
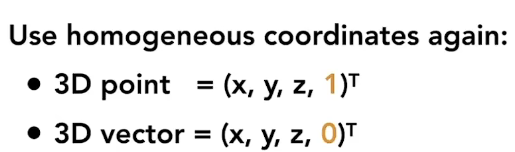
三维的齐次坐标
三维的仿射变换
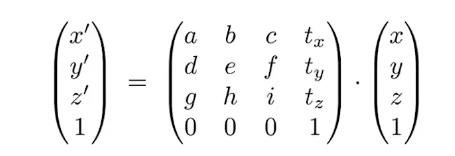
先运用线性变换,再使用平移
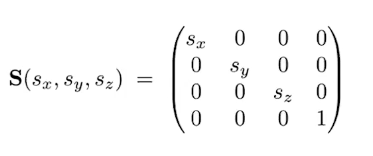
缩放
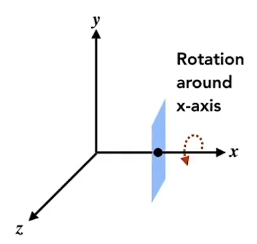
三维旋转
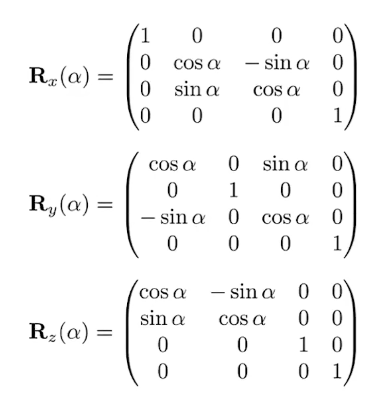
绕着哪个轴旋转,哪个轴不变
注意:绕y轴旋转有变换,按xyz顺序排,xy=z,yz=x,zx=y=-xz,所以要加个负号
旋转的完备性

Rodrigues 旋转公式
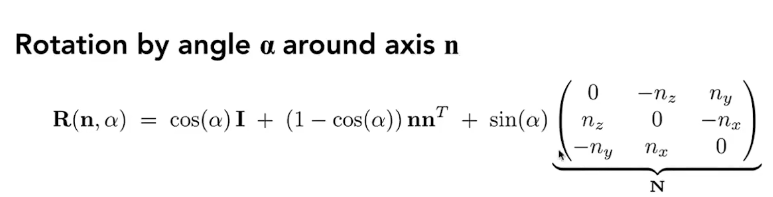
旋转轴默认是过原点的,即起点是原点,方向是n
解释
- 若旋转轴起点不在原点,则进行组合变换(先平移再旋转再平移)
- N矩阵,是旋转方向n的叉乘矩阵
四元数
解决旋转矩阵不好解决角度插值的问题
viewing transformation
view (camera) transformation (解决怎么看)
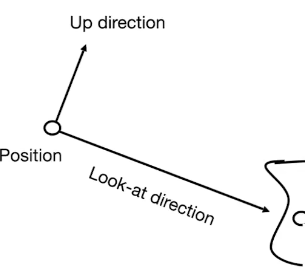
定义相机
- 相机位置
- 往哪看(look-at)
- 相机的向上方向
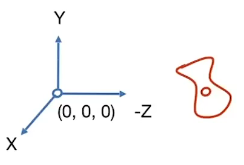
相机坐标系
相机位于原点,向上是y轴,往-z方向看
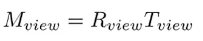
任意相机位置移动到标准位置——M
步骤:
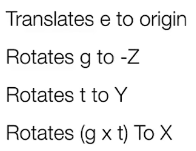
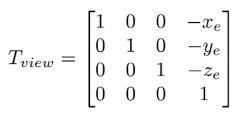
平移变换:
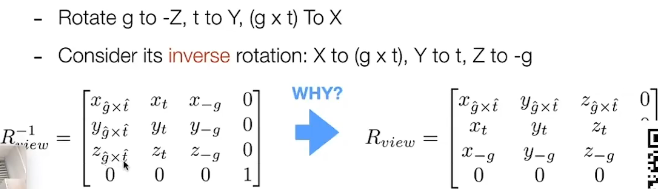
旋转变换:
先写出旋转的逆变换,再求逆
物体也跟随相机进行变换M(无相对移动)
projection transformation (投影变换)
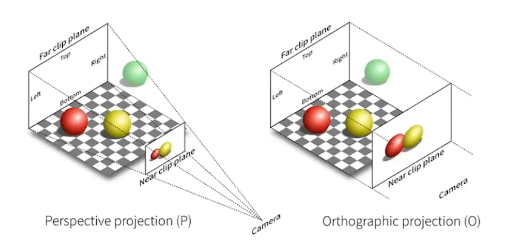
正交投影(orthographic projection)
将相机移到标准位置——》丢掉物体的z维度——》将物体平移并缩放到[-1,1]的正方形中(约定俗成)
正式做法:
将空间中的立方体转换成标准的立方体([-1,1]的正方体)
透视投影 (perspective projection)
将远平面近平面的锥体挤压成一个长方体,再进行正交投影
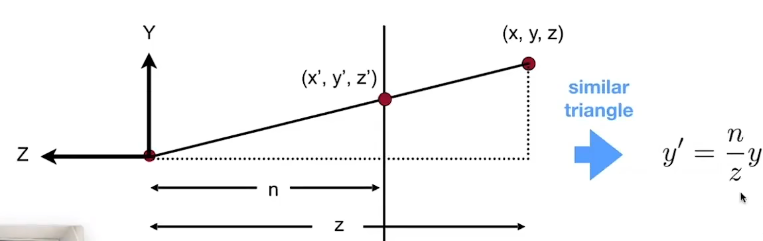
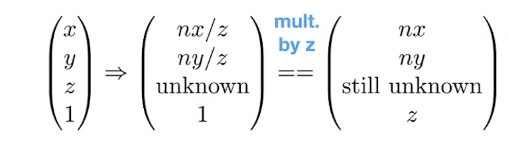
已知部分的转换矩阵
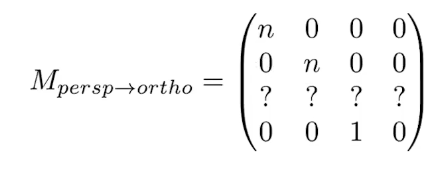
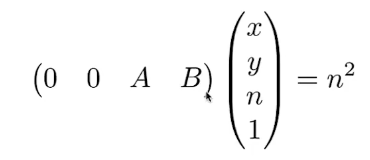
对第三行的推导:
已知:
- 近平面的点不会改变
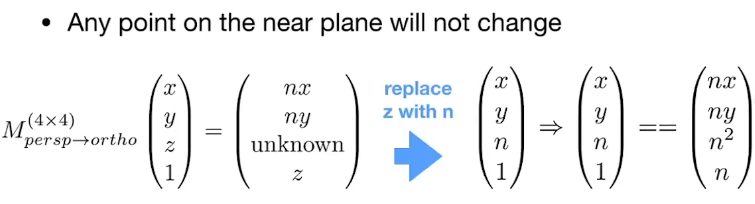
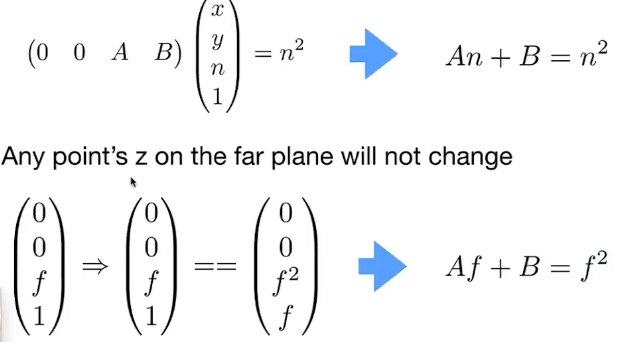
- 远平面的点上的z值不会改变
得到方程组:

GAMES101-lecture04
You need to set
install_url to use ShareThis. Please set it in _config.yml.